分类

技 术 特 点
☆ 驱动电压:10V~40V直流供电。
☆ H桥双极恒相流驱动。
☆ 大3A的八种输出电流可选。
☆ 大64细分的七种细分模式可选。
☆ 输入信号光电隔离。
☆ 标准共阳单脉冲接口。
☆ 脱机保持功能。
☆ 半密闭式机壳可适应更严苛环境。
☆ 提供节能的自动半电流锁定功能。
电 气 特 性(环境温度Tj=25℃时)
供 电 电 源 | 10V~ 40VDC,容量0.03KVA |
输 出 电 流 | 峰值3A/相(Max)(输出电流可由面板拨码开关设定) |
驱 动 方 式 | 恒相流PWM控制 |
| 励 磁 方 式 | 整步、半步及4、8、16、32、64五种细分方式 |
| 绝 缘 电 阻 | 在常温常压下>100MΩ |
| 绝 缘 强 度 | 在常温常压下0.5KV,1 分钟 |
使用环境及参数
冷 却 方 式 | 自然冷气(恶劣情况下需外加辅助散热) | |
使 用 环 境 | 场 合 | 尽量避免粉尘、油雾及腐蚀性气体 |
温 度 | 0℃ ~ +50℃ | |
湿 度 | <80%RH,无凝露,无结霜 | |
震 动 | 5.9m/s 2 Max | |
保 存 温 度 | -20℃ ~ +65℃ | |
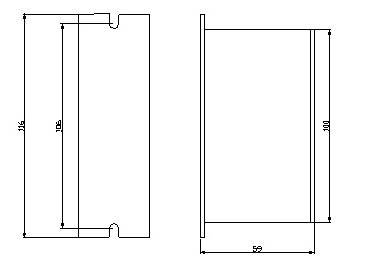
外 形 尺 寸 | 116×60×37mm | |
重 量 | 0.21Kg | |
电 源 电 压
驱动器内部的开关电源设计保证了可以适应较宽的电压范围,用户可根据各自的情况在10V到40VDC之间选择。一般来说较高的额定电源电压有利于提高电机的高速力矩,但却会加大驱动器的损耗和温升。
输 出 电 流 选 择
本驱动器最大输出电流值为3A/相(峰值),通过驱动器面板上六位拨码开关的第5、6、7三位可组合出八种状态,对应八种输出电流,从0.9A到3A(详见电流选择表)以配合不同的电机使用。
说明:面板丝印上的白色方块对应开关的实际位置。
5 | 6 | 7 | 5 | 6 | 7 | 5 | 6 | 7 | 5 | 6 | 7 | 7 | |||
ON | ON | ON | 0.9A | ON | OFF | ON | 1.5 | ON | ON | OFF | 1.2A | ON | OFF | OFF | 1.8A |
OFF | ON | ON | 2.1A | OFF | OFF | ON | 2.7A | OFF | ON | OFF | 2.4A | OFF | OFF | OFF | 3A |
细 分 选 择
本驱动器可提供整步、改善半步、4细分、8细分、16细分、32细分和64细分七种运行模式,利用驱动器面板上六位拨码开关的第1、2、3三位可组合出不同的状态(详见细分模式选择表)。
说明:面板丝印上的白色方块对应开关的实际位值。
1 | 2 | 3 | 1 | 2 | 3 | 1 | 2 | 3 | 1 | 2 | 3 | ||||
ON | ON | ON | 保留 | ON | OFF | ON | 32细分 | ON | ON | OFF | 8细分 | ON | OFF | OFF | 半步 |
OFF | ON | ON | 64细分 | OFF | OFF | ON | 16细分 | OFF | ON | OFF | 4细分 | OFF | OFF | OFF | 整步 |
自动半电流
若上位控制机在半秒钟内没有发出步进脉冲信号,驱动器将自动进入节电的半电流运行模式,电机绕组的相电流将减为设定值的一半,在此状态下电机和驱动器的功耗得以降低,但电机的输出力矩也相应下降。在下一个脉冲到来时驱动器自动恢复输出电流为额定值。
错相保护
两相电机与驱动器连接时,用户极易接错相,从而严重损坏驱动器。本驱动器设计了错相保护电路。用户即使接错相,驱动器也不会损坏,不过电机运行会不正常,主要表现在出力极小。遇此情况,应检查电机接线是否正确。
关于散热
工作温度过高是大部分线路故障的根源,有效散热对于提高可靠性和运行寿命尤其重要。建议将驱动器紧密地固定在用户的金属机箱上,通过机箱底板协助散热。有条件的话还可在接触面上加硅脂等导热材料。如果外加散热风扇,驱动器的温升会大为降低。
输入信号
驱动器的接线端子采用可拔插端子,可以先将其拨下,接好线后再插上。注意为避免端子上的螺钉意外丢失,在不接线时也应将端子的螺钉拧紧。
公共端:本驱动器的输入信号采用共阳极接线方式,用户应将输入信号的电源正极连接到该端子上,将输入的控制信号连接到对应的信号端子上。控制信号低电平有效,此时对应的内部光耦导通,控制信号输入驱动器中。
脉冲信号输入:共阳极时该脉冲信号下降沿被驱动器解释为一个有效脉冲,并驱动电机运行一步。为了确保脉冲信号的可靠响应,共阳极时脉冲低电平的持续时间不应少于10μs。本驱动器的信号响应频率为70KHz,过高的输入频率将可能得不到正确响应。
方向信号输入:该端信号的高电平和低电平控制电机的两个转向。共阳极时该端悬空被等效认为输入高电平。控制电机转向时,应确保方向信号领先脉冲信号至少10μs建立,可避免驱动器对脉冲的错误响应。
脱机信号输入:该端接受控制机输出的高/低电平信号,共阳极时低电平时电机相电流被切断,转子处于自由状态(脱机状态)。共阳极时高电平或悬空时,转子处于锁定状态。
典 型 接 线 图
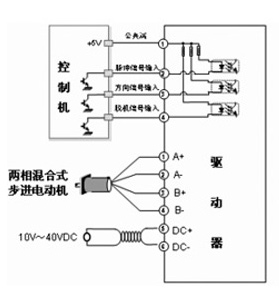 | 注意: |
外 型 尺 寸 图
(单位:mm)